RSS Google AI Blog
Follow
How we created HOV-specific ETAs in Google Maps
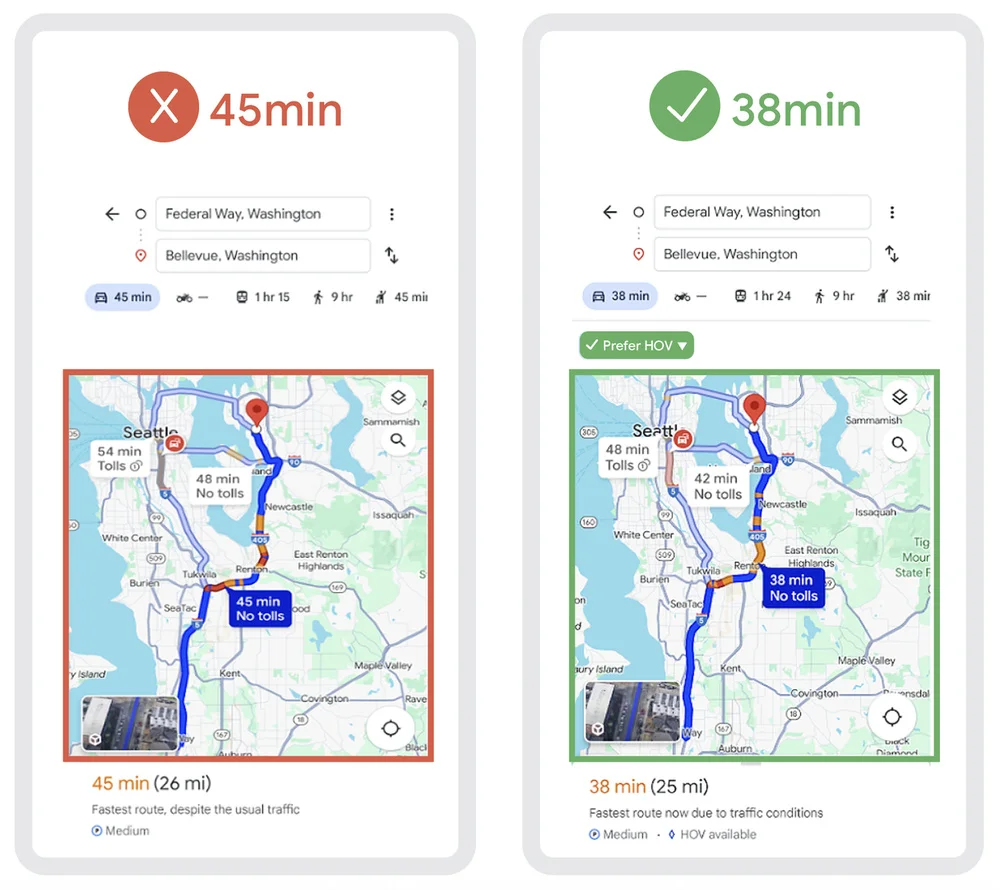
The shift to sustainable travel modes like electric vehicles, carpooling, and public transit has made travel times more varied due to the availability of dedicated lanes like carpool lanes. HOV lanes are typically faster than general lanes during rush hour, with an average speed difference of about 16% in Utah's Salt Lake Valley. Accurate estimated time of arrival (ETA) predictions and optimized routing are key to improving the commuting experience. Google Maps recently introduced a feature that lets drivers select routes that include HOV lanes and see that route's ETA. To develop this feature, Google developed a classification system to determine HOV trips from non-HOV trips. The classification system uses an unsupervised learning approach, analyzing aggregated and anonymized traffic trends to infer past HOV travel times. The system then uses these inferred times to train ETA prediction models specifically for HOV lanes. The classification task involves analyzing speed data, estimated lateral distance to the center of the road, and temporal clustering to differentiate between HOV and non-HOV travelers. The final trip classification is determined by aggregating classification outcomes from each segment and using a mixture of experts approach. The new HOV-based ETA estimates have improved overall ETA accuracy for drivers using this feature by 75%, making it comparable to routes without HOV lanes.