Flux RSS du blog Google IA
Suivre
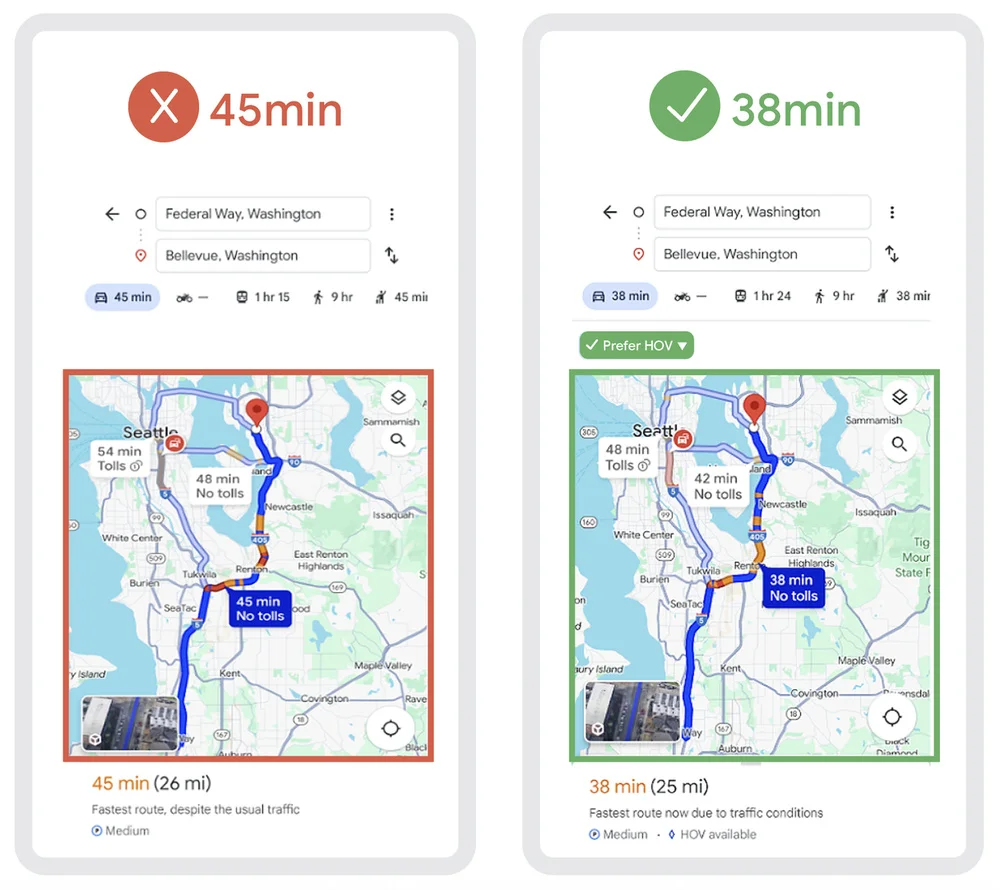
Comment nous avons créé des ETA spécifiques aux VHO dans Google Maps
Le passage à des modes de transport durable comme les véhicules électriques, le covoiturage et les transports en commun a rendu les temps de trajet plus variés en raison de la disponibilité de voies réservées comme les voies de covoiturage. Les voies HOV (High-Occupancy Vehicle) sont généralement plus rapides que les voies générales pendant les heures de pointe, avec une différence de vitesse moyenne d'environ 16% dans la vallée de Salt Lake City, dans l'Utah. Des prédictions précises de l'heure d'arrivée estimée (ETA) et des itinéraires optimisés sont essentiels pour améliorer l'expérience des trajets. Google Maps a récemment introduit une fonctionnalité qui permet aux conducteurs de sélectionner des itinéraires qui incluent des voies HOV et de voir l'ETA de cet itinéraire. Pour développer cette fonctionnalité, Google a mis au point un système de classification pour déterminer les trajets HOV par rapport aux trajets non-HOV. Le système de classification utilise une approche d'apprentissage non supervisé, analysant les tendances de trafic agrégées et anonymisées pour inférer les temps de trajet HOV passés. Le système utilise ensuite ces temps inférés pour entraîner des modèles de prédiction d'ETA spécifiquement pour les voies HOV. La tâche de classification implique l'analyse des données de vitesse, de la distance latérale estimée par rapport au centre de la route et du regroupement temporel pour différencier entre les voyageurs HOV et non-HOV. La classification finale du trajet est déterminée en agrégeant les résultats de classification de chaque segment et en utilisant une approche de mélange d'experts. Les nouvelles estimations d'ETA basées sur les voies HOV ont amélioré la précision globale de l'ETA pour les conducteurs utilisant cette fonctionnalité de 75%, la rendant comparable aux itinéraires sans voies HOV.