GoogleマップでHOV専用の到着予定時刻を作成した方法
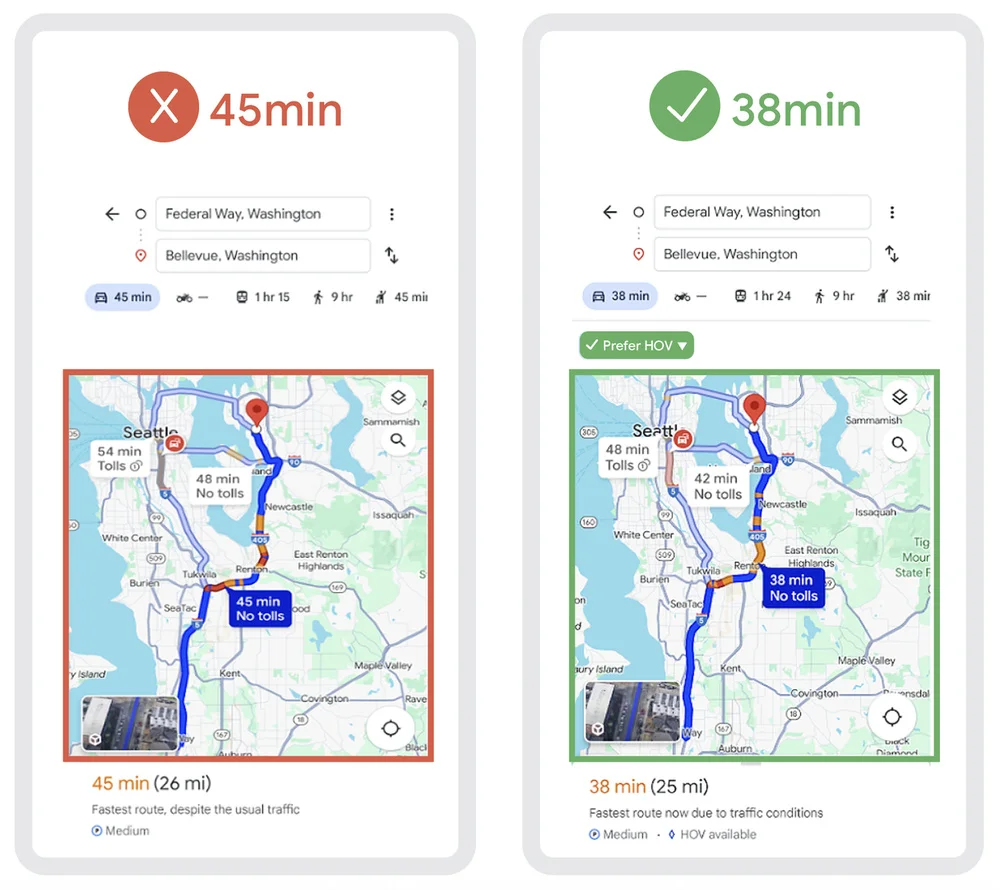
持続可能な移動手段(電気自動車、相乗り、公共交通機関など)への移行は、相乗りレーンなどの専用レーンの利用可能性により、移動時間をより多様化させています。HOVレーンは、一般的にラッシュアワーには一般レーンよりも速く、ユタ州ソルトレイクバレーでは平均速度差が約16%です。正確な到着予定時刻(ETA)予測と最適化されたルーティングは、通勤体験を向上させる鍵となります。Googleマップは最近、ドライバーがHOVレーンを含むルートを選択し、そのルートのETAを確認できる機能を開始しました。この機能を開発するために、GoogleはHOV移動と非HOV移動を判断するための分類システムを開発しました。この分類システムは、教師なし学習アプローチを使用し、集計および匿名化された交通トレンドを分析して、過去のHOV移動時間を推測します。その後、システムはこれらの推測された時間を使用して、HOVレーン専用のETA予測モデルをトレーニングします。分類タスクには、速度データ、道路中央への推定横方向距離、および時間的クラスタリングを分析して、HOV利用者と非HOV利用者を区別することが含まれます。最終的な移動分類は、各セグメントからの分類結果を集計し、専門家の混合アプローチを使用して決定されます。HOVに基づいた新しいETA推定値は、この機能を使用するドライバーの全体的なETA精度を75%向上させ、HOVレーンがないルートと同等の精度を実現しました。