RSS 구글 AI 블로그
팔로우
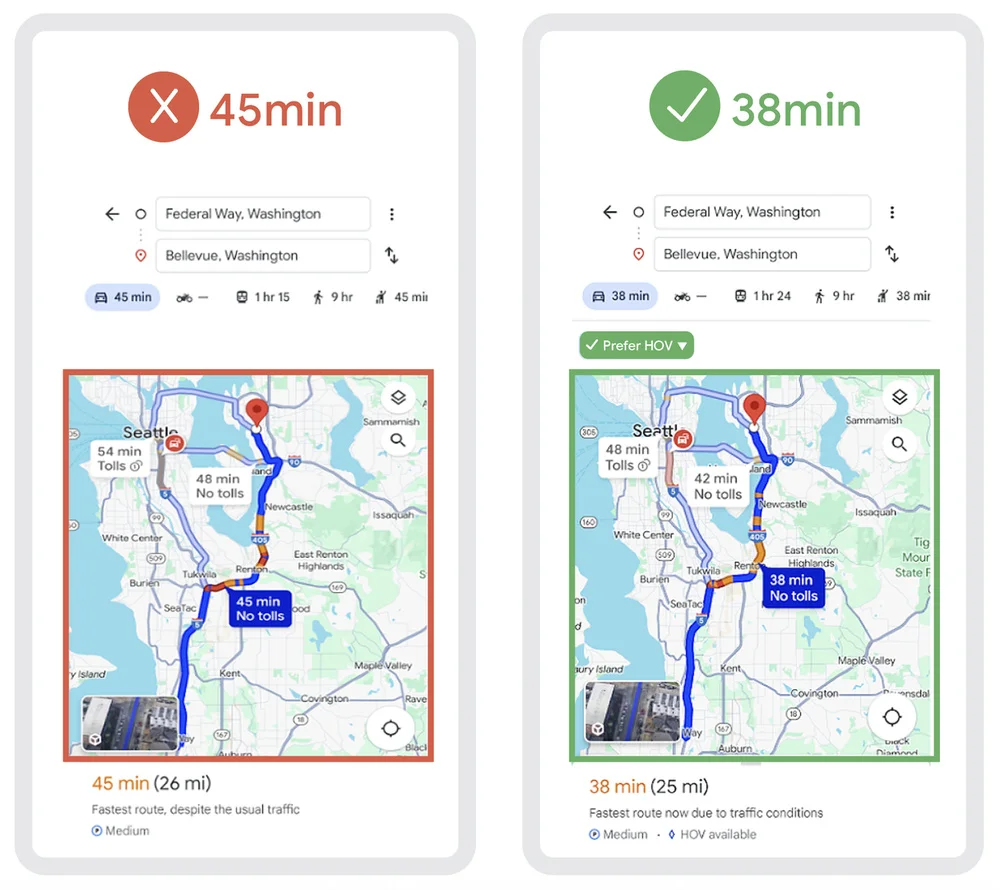
Google 지도에서 HOV 특정 ETA를 만드는 방법
전기 자동차, 카풀, 대중교통과 같은 지속 가능한 교통수단으로의 전환은 카풀 차선과 같은 전용 차선의 가용성으로 인해 이동 시간을 더욱 다양하게 만들었습니다. HOV 차선은 일반적으로 러시아워 시간대에 일반 차선보다 빠르며, 유타주 솔트레이크 밸리에서는 평균 속도 차이가 약 16%입니다. 정확한 도착 예정 시간(ETA) 예측과 최적화된 경로 설정은 통근 경험을 개선하는 데 중요합니다. 구글 지도는 최근 운전자들이 HOV 차선을 포함하는 경로를 선택하고 해당 경로의 ETA를 확인할 수 있는 기능을 도입했습니다. 이 기능을 개발하기 위해 구글은 HOV 통행과 비HOV 통행을 구분하는 분류 시스템을 개발했습니다. 이 분류 시스템은 비지도 학습 접근 방식을 사용하여 집계되고 익명화된 교통 추세를 분석하여 과거 HOV 이동 시간을 추론합니다. 그런 다음 이 추론된 시간을 사용하여 HOV 차선에 특화된 ETA 예측 모델을 훈련합니다. 분류 작업에는 HOV 통행자와 비HOV 통행자를 구별하기 위해 속도 데이터, 도로 중앙선까지의 추정 측면 거리, 시간적 클러스터링을 분석하는 작업이 포함됩니다. 최종 통행 분류는 각 구간의 분류 결과를 집계하고 전문가 혼합(mixture of experts) 접근 방식을 사용하여 결정됩니다. 새로운 HOV 기반 ETA 추정치는 이 기능을 사용하는 운전자의 전반적인 ETA 정확도를 75% 향상시켜 HOV 차선이 없는 경로와 비슷한 수준으로 만들었습니다.