RSS Блог Google AI
Подписаться
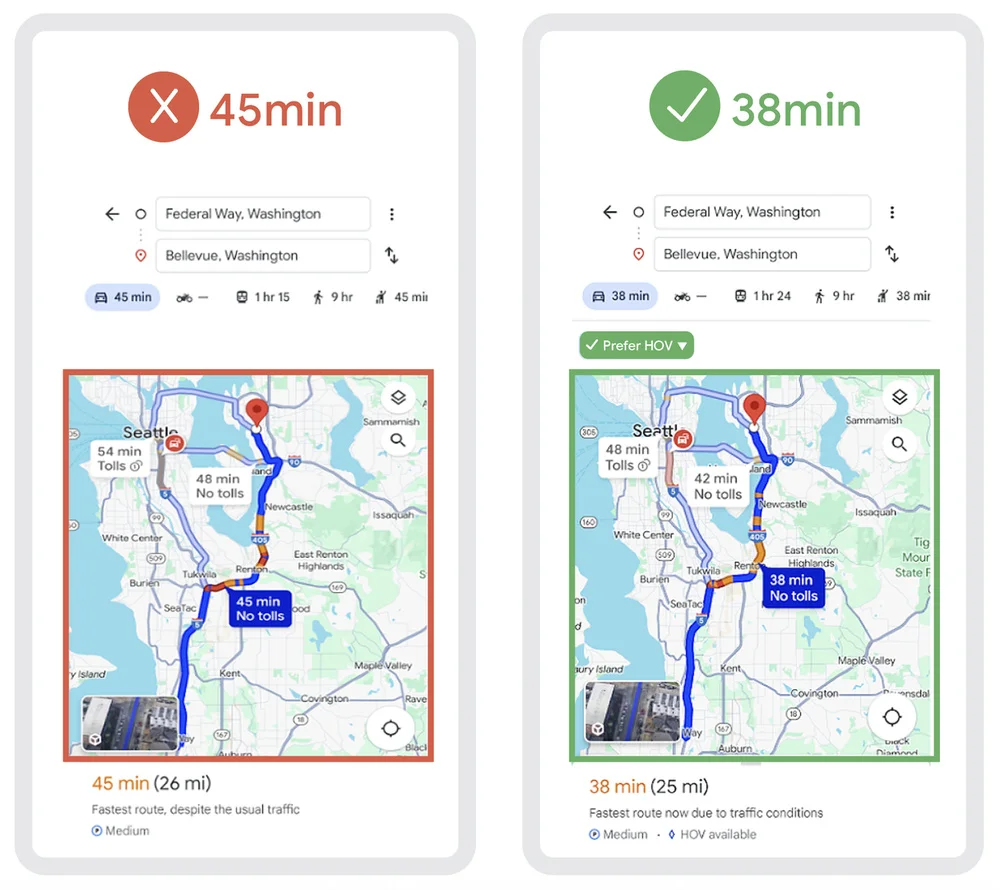
Как мы создали расчетное время прибытия (ETA) для полос движения HOV в Google Картах.
Переход к экологичным видам транспорта, таким как электромобили, совместное использование автомобилей и общественный транспорт, привёл к большей вариативности времени в пути из-за доступности выделенных полос, например, полос для автомобилей с несколькими пассажирами (HOV). Полосы HOV обычно быстрее обычных полос в часы пик, при этом средняя разница в скорости составляет около 16% в Солт-Лейк-Вэлли в штате Юта. Точные прогнозы предполагаемого времени прибытия (ETA) и оптимизированная маршрутизация являются ключевыми факторами для улучшения опыта поездок на работу. Google Maps недавно представила функцию, которая позволяет водителям выбирать маршруты, включающие полосы HOV, и видеть ETA для этого маршрута. Для разработки этой функции Google разработала систему классификации для определения поездок HOV от поездок без HOV. Система классификации использует подход неконтролируемого обучения, анализируя агрегированные и анонимизированные тенденции трафика, чтобы сделать вывод о прошлом времени в пути по полосам HOV. Затем система использует эти полученные данные для обучения моделей прогнозирования ETA специально для полос HOV. Задача классификации включает в себя анализ данных о скорости, оцененного бокового расстояния до центра дороги и временной кластеризации для различения пользователей полос HOV и обычных полос. Окончательная классификация поездки определяется путем агрегирования результатов классификации по каждому сегменту и использования подхода "смеси экспертов". Новые оценки ETA на основе HOV улучшили общую точность ETA для водителей, использующих эту функцию, на 75%, что делает ее сопоставимой с маршрутами без полос HOV.