RSS Google KI-Blog
Folgen
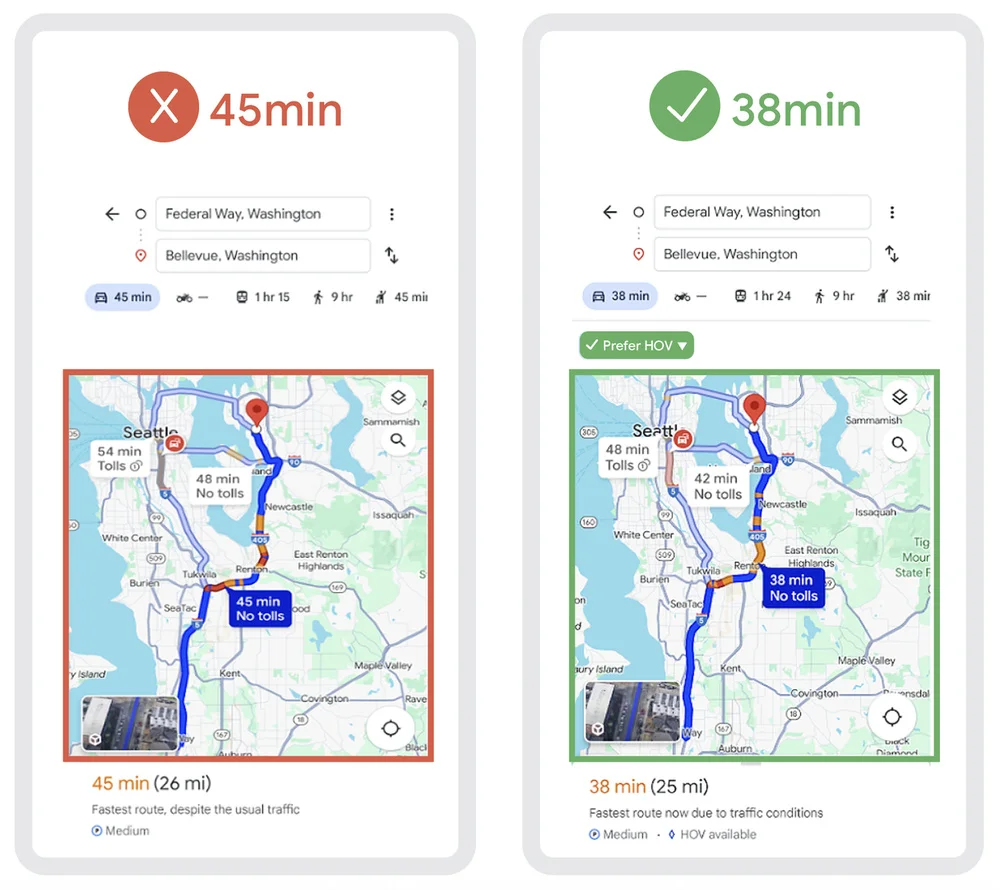
Wie wir HOV-spezifische ETAs in Google Maps erstellt haben
Der Wandel hin zu nachhaltigen Verkehrsmitteln wie Elektrofahrzeugen, Fahrgemeinschaften und öffentlichen Verkehrsmitteln hat die Reisezeiten variabler gemacht, da spezielle Fahrspuren wie Fahrgemeinschaftsspuren zur Verfügung stehen. HOV-Spuren sind in der Regel während der Stoßzeiten schneller als allgemeine Fahrspuren, mit einem durchschnittlichen Geschwindigkeitsunterschied von etwa 16 % im Salt Lake Valley in Utah. Genaue Vorhersagen der voraussichtlichen Ankunftszeit (ETA) und eine optimierte Routenplanung sind entscheidend für die Verbesserung des Pendlererlebnisses. Google Maps hat kürzlich eine Funktion eingeführt, mit der Fahrer Routen mit HOV-Spuren auswählen und die ETA dieser Routen sehen können. Um diese Funktion zu entwickeln, hat Google ein Klassifizierungssystem entwickelt, um HOV-Fahrten von Nicht-HOV-Fahrten zu unterscheiden. Das Klassifizierungssystem verwendet einen unüberwachten Lernansatz, der aggregierte und anonymisierte Verkehrstrends analysiert, um vergangene HOV-Reisezeiten abzuleiten. Das System verwendet dann diese abgeleiteten Zeiten, um ETA-Vorhersagemodelle speziell für HOV-Spuren zu trainieren. Die Klassifizierungsaufgabe beinhaltet die Analyse von Geschwindigkeitsdaten, der geschätzten seitlichen Entfernung zur Straßenmitte und zeitlicher Clusterbildung, um zwischen HOV- und Nicht-HOV-Reisenden zu unterscheiden. Die endgültige Fahrtenklassifizierung wird durch die Aggregation von Klassifizierungsergebnissen aus jedem Segment und die Verwendung eines "Mixture of Experts"-Ansatzes bestimmt. Die neuen HOV-basierten ETA-Schätzungen haben die allgemeine ETA-Genauigkeit für Fahrer, die diese Funktion nutzen, um 75 % verbessert und sie mit Routen ohne HOV-Spuren vergleichbar gemacht.